Les compartimos el trabajo del Armando durante el curso de Robótica Móvil del semestre 2019-II. Esta es su implementación del algoritmo de navegación por campos potenciales.

Les compartimos el trabajo del Armando durante el curso de Robótica Móvil del semestre 2019-II. Esta es su implementación del algoritmo de navegación por campos potenciales.

El semestre 2018-II vio la primer edición del curso de Robótica Móvil para Ciencias de la Computación. El objetivo es sacar el mayor provecho de los conocimientos adquiridos a lo largo de la carrera, desde programar en C++ o Python, hasta sistemas operativos, cómputo distribuido, análisis de algoritmos o ingeniería de software. Todo, programando comportamientos para robots tanto en simulaciones como en robots físicos.
La primer generación contó con dos entusiastas computólogos (Antonio y Daniel), uno de los cuales ya presentó un artículo sobre su trabajo en el ComRob 2018, y un matemático (Iván Rafael) quien posteriormente realizó una estancia en Alemania, programando con ROS. Antonio y Daniel están escribiendo su tesis en temas relacionados.
Aún tenemos trabajo qué hacer antes de integrarnos con los equipos mayores de la UNAM, pero vamos sentando las bases para que la facultad de ciencias también tenga robots inteligentes circulando por sus pasillos.
Estamos preparando todo para impartir el próximo semestre el primer curso de robótica móvi para Ciencias de la Computación. El objetivo es preparar a los alumnos de esta carrera para enfrentar el reto de desarrollar robots inteligentes.
Ya tenemos el equipo (tres turtlebots para que los equipos puedan probar su programas en robots de verdad) y el temario está en proceso para ser aprobado.
El objetivo del curso será estudiar los algoritmos tradicionales de robótica para programar robots de asistencia al estilo de los que compiten en Robocup@home. Aunque nuestros robots son un poco chaparritos para esta liga, sus algoritmos serán igualmente adecuados. Para quienes les interese continuar trabajando en esta linea, también estamos colaborando con alumnos de ingeniería para la construcción de un robot humanoide. Pronto tendremos más noticias.

En el Seminario de Ciencias de la Computación A (Aprendizaje profundo aplicado a robótica) estamos montando el equipo para el grupo de robótica de la carrera de Ciencias de la Computación.
Antonio, Benjamín y Vladimir son los pioneros en este esfuerzo y les está tocando armar y configurar el equipo recién llegado, así como experimentar con el uso de ROS (Sistema Operativo para Robots) y algoritmos de redes neuronales, para que el robot aprenda a reconocer comandos, imágenes y decida qué acciones tomar.




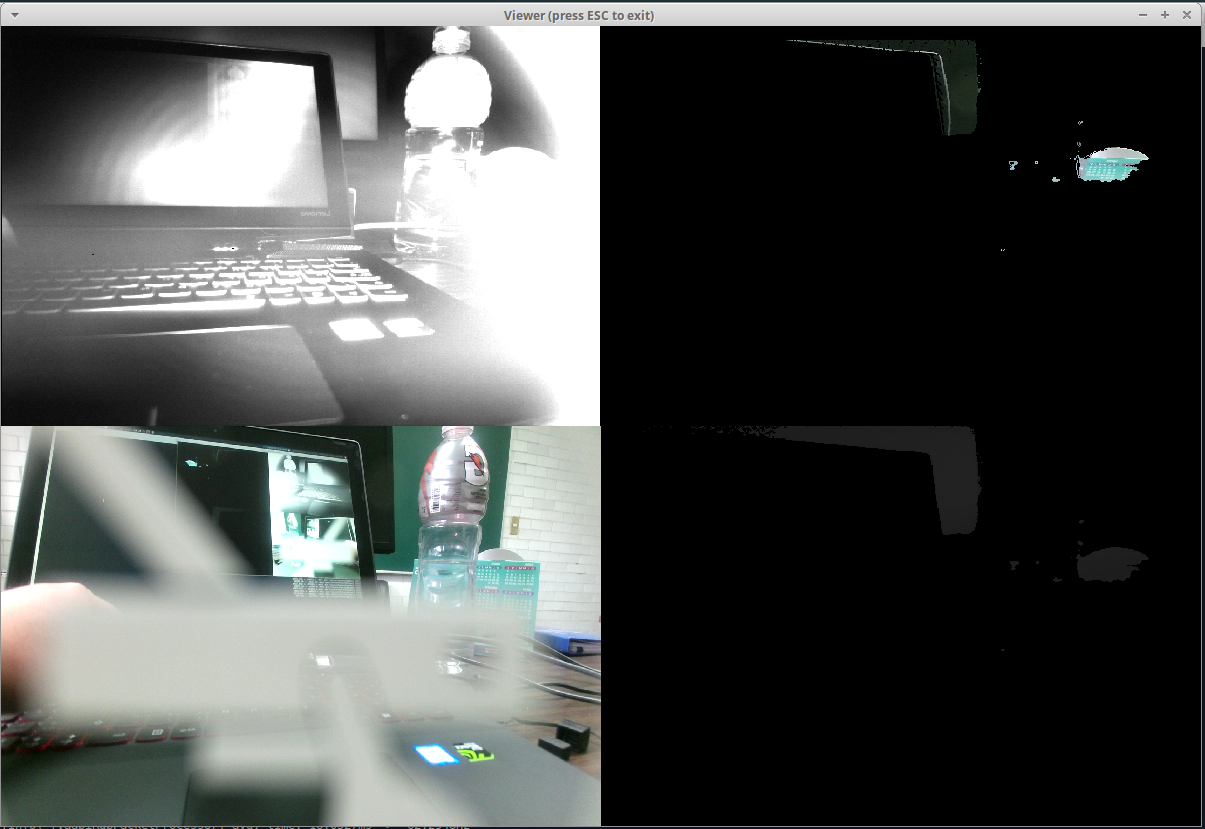
Estamos trabajando, junto con la Facultad de Ingeniería, para que la Facultad de Ciencias cuente también con su robot humanoide y podamos implementar, desarrollar y probar algoritmos para robótica móvil. Por lo pronto adjunto la primer captura de pantalla utilizando el Kinect One que usaremos como ojos del robot. Gracias a la comunidad de software libre ya funciona perfectamente con Linux. Las manchas en la pantalla se deben a que aún tiene el plástico protector puesto 😉
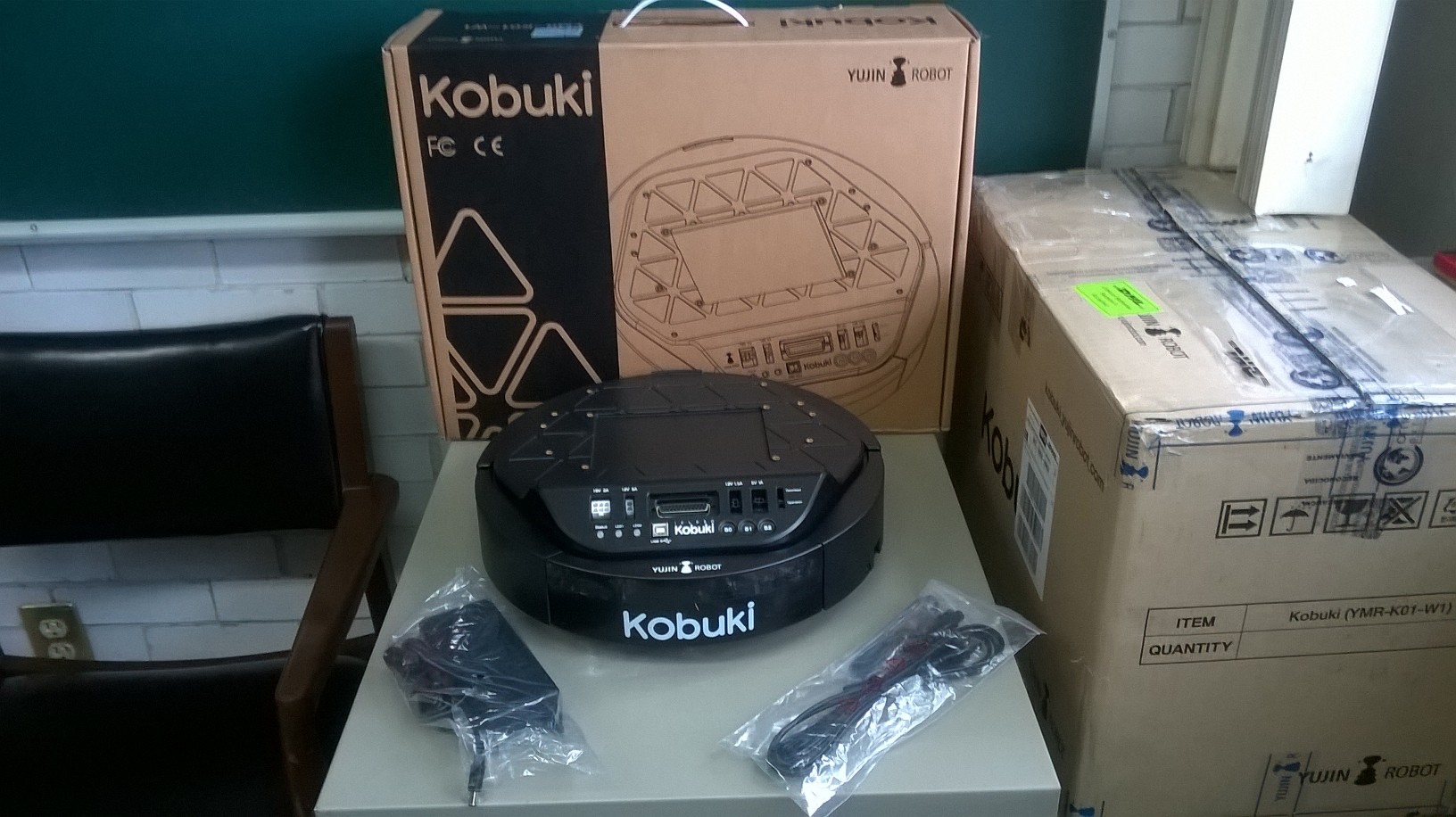
Base robótica Kobuki, componente escencial del Turtlebot 2
Acaban de llegar a la facultad las primeras bases robóticas para nuestro taller de aprendizaje de máquina multimodal. Vienen desde Korea y forman parte del equipo básico para lo que se convertirá en un taller de inteligencia artificial aplicada a robótica.
Los chicos de servicio social y yo, así como los interesados en participar en el Seminario de Ciencias de la Computación A (Aprendizaje profundo) que se abrirá en el semestre 2017-I, estaremos preparando el material para la materia optativa que planeamos abrir en el 2017 (año civil).
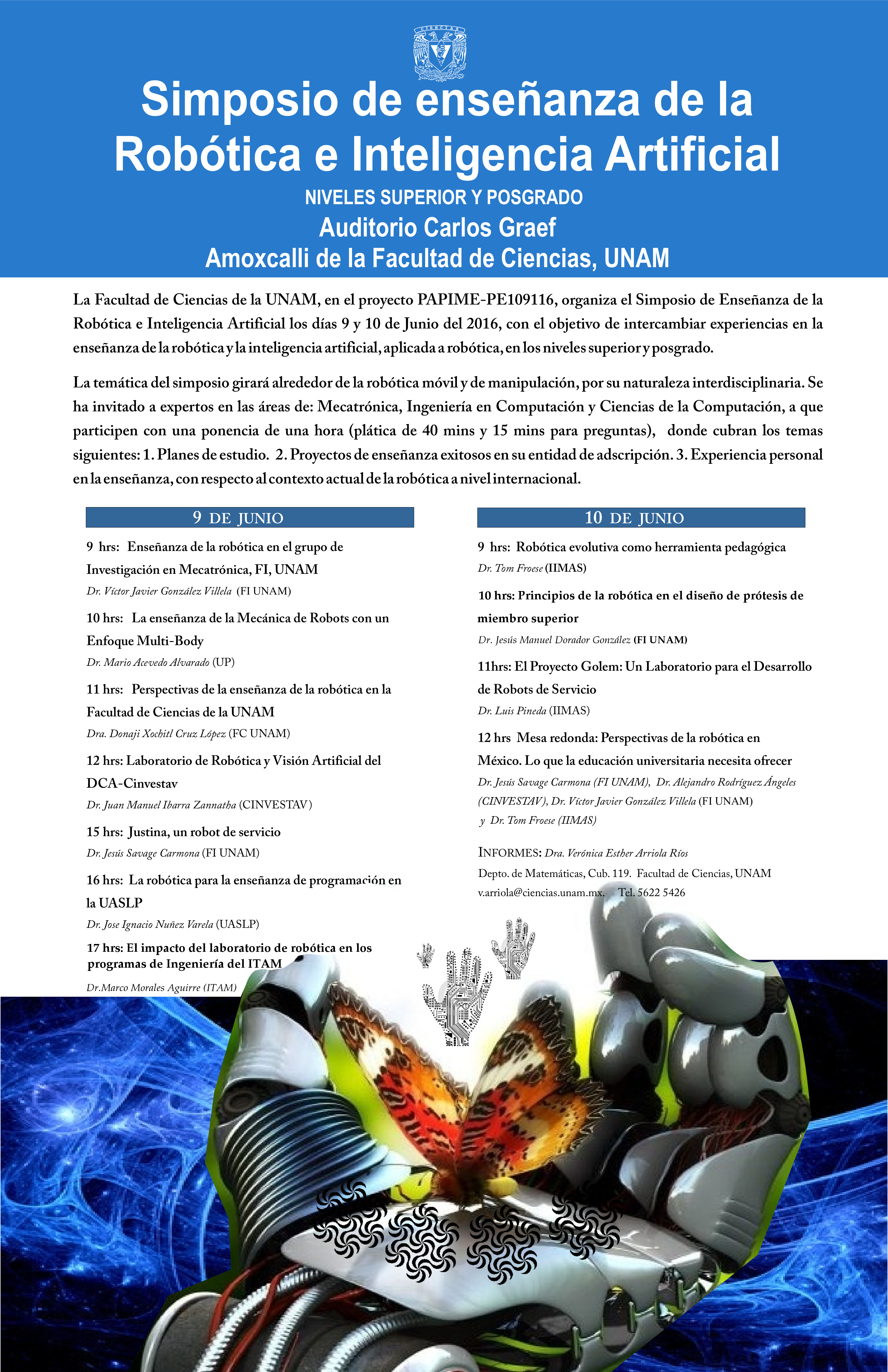
Cartel con el programa final del simposio con detalles de los ponentes y sus pláticas.
La semana pasada tuvimos un Simposio de Enseñanza de la Robótica en la facultad, que reunió varios expertos de distintas disciplinas dentro del campo de la robótica. Desde ingenieros expertos en mecánica, eléctrica y electrónica; doctores con formación tanto en ingeniería como en ciencias de la computación, hasta representates de física y ciencias computacionales, presentaron temas de investigación que comparten con sus estudiantes, métodos de enseñanza, experiencias en competiciones locales e internacionales y debatieron sobre el rumbo que lleva el desarrollo de la robótica en México, los alcances de la inteligencia artificial y, en ocasiones hasta asombrando a los mismos ponentes: las perspectivas que tenemos para establecer colaboraciones interdisciplinarias.
Con anécdotas como “es más fácil que los alumnos del IPN crucen 20 kilómetros para venir a colaborar con la FI de la UNAM, a que los miembros de la Facultad de Ingeniería y los de la Facultad de Ciencias crucemos la calle para hablar entre nosotros”, se presentaron los diferentes retos que enfrentamos para atacar proyectos de gran envergadura, que requieren de la complementación de nuestras capacidades.

Evento Mesa redonda, evento final del Simposio.
Agradecemos especialmente la colaboración de todos nuestros ponentes y a quienes se registraron para atender el Simposio Completo.
El proyecto “Laboratorio de aprendizaje de máquina multimodal” propone el diseño de un curso práctico avanzado para la carrera de Ciencias de la Computación en el que se cubra el uso de aprendizaje de máquina en la modalidad “aprendizaje profundo”. Dicho curso, además de cubrir los fundamentos teóricos de esta metodología, permitirá a los alumnos aplicarla en el campo de la robótica móvil.
Busco uno o dos estudiantes interesados en redes neuronales, aprendizaje profundo y robótica, para que se titulen de licenciatura realizando algunas de las actividades siguientes:
Las condiciones son:
Se ofrece el tabulador de la UNAM para proyectos PAPIME:
Interesados: presentarse en el cubículo 119 del Depto. de Matemáticas, con la Dra. Verónica E. Arriola. Traer historial académico completo impreso.
La opción de titulación será registrada oficialmente para poder asignar la beca, por lo que los tiempos para concluir el trabajo son estrictos. Consultar detalles sobre el registro en:
Con motivo del proyecto “Representación interna de objetos deformables para agentes inteligentes” estoy buscando un estudiante interesado en robots móviles y/o visión 3D por computadora, para que se titule de licenciatura realizando las actividades siguientes:
Las condiciones son:
Se ofrece el tabulador de la UNAM:
Interesados: presentarse en el cubículo 119 del Depto. de Matemáticas, con la Dra. Verónica E. Arriola. Traer historial académico completo impreso.
La opción de titulación será registrada oficialmente para poder asignar la beca, por lo que los tiempos para concluir el trabajo son estrictos. Consultar detalles sobre el registro en:
Como inicio de mis labores como docente de tiempo completo, he propuesto el proyecto de investigación “Imaginería mental”.
Se considera a la imaginería mental como experiencia casi-perceptual, que se asemeja a la experiencia perceptual, pero ocurre en la ausencia de estímulos externos apropiados, es un tipo especial de proceso de atención orientado hacia las representaciones internas; una forma de representación mental, generada intencionalmente. Se considera que la imaginería mental puede jugar un rol importante en la memoria, mecanismos de motivación, razonamiento espacial, inventiva o pensamiento creativo. Puede ser fundamento para el lenguaje, el pensamiento y ser utilizada para realizar planes [Thomas (2014)]. Este proyecto propone la siguiente hipótesis:
Una forma de utilizar el concepto de imaginería mental en robótica e inteligencia artificial consiste en utilizar ambientes virtuales como formas de imaginería mental. Es decir, se buscaría que un robot adquiera información de su entorno, a través de sus sensores, para reconstruir un escenario de realidad virtual que asemeje dicho entorno. Dicha representación virtual debe verse enriquecida con métodos para representar incertidumbre, así como conceptos generados y almacenados en capas de abstracción cada vez mayor, para ser explotados con el mayor beneficio, como ya se ha hecho para representar conocimiento espacial [Pronobis et al. (2010)]. La imaginería mental no aplica únicamente en el caso de información visual y espacial, sino también auditiva, de tacto y otros modos sensoriales. Investigar su explotación en otros modos sensoriales, así como la colaboración entre varios modos sensoriales (etapa multi-modal) permite su aplicación directa en problemas como la generación de conceptos e interpretación y generación de lenguaje.
Para diseñar y producir un sistema robótico capaz de beneficiarse de la imaginería mental, se propone utilizar una arquitectura como la que describe Mesulam (1998), con respecto al cerebro humano.
Bibliografía