El proyecto “Laboratorio de aprendizaje de máquina multimodal” propone el diseño de un curso práctico avanzado para la carrera de Ciencias de la Computación en el que se cubra el uso de aprendizaje de máquina en la modalidad “aprendizaje profundo”. Dicho curso, además de cubrir los fundamentos teóricos de esta metodología, permitirá a los alumnos aplicarla en el campo de la robótica móvil.
Busco uno o dos estudiantes interesados en redes neuronales, aprendizaje profundo y robótica, para que se titulen de licenciatura realizando algunas de las actividades siguientes:
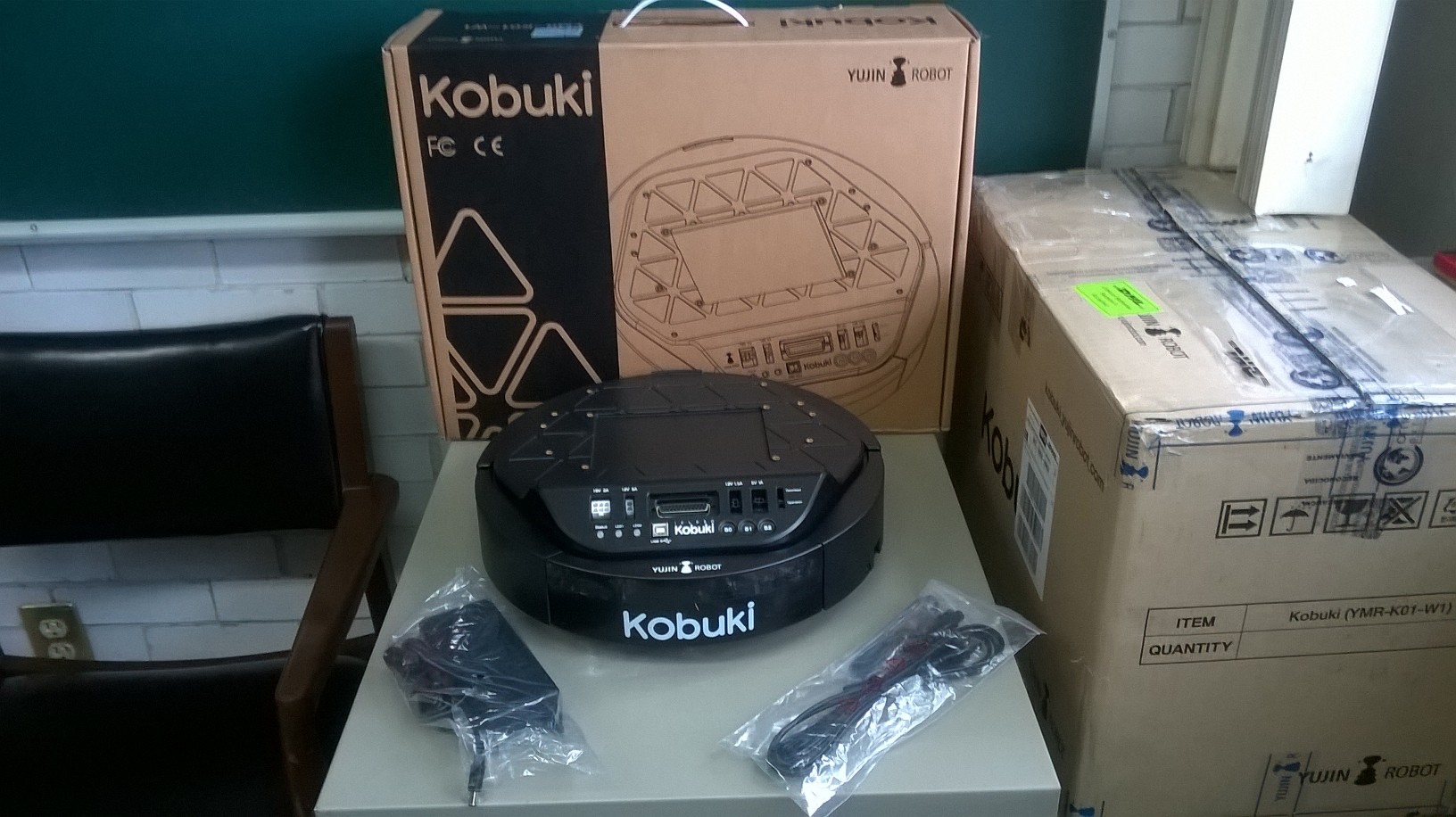
- Ensamblar y configurar robots móviles tipo TurtleBot, redactando el manual correspondiente.
- Programar acciones de control básicas para la plataforma robótica: avanzar, retroceder, girar, etc.
- Adaptar una mano robótica de bajo costo al robot y programar los controladores.
- Programar bibliotecas con las acciones básicas para la mano (agarrar, soltar, desplazarse, etc).
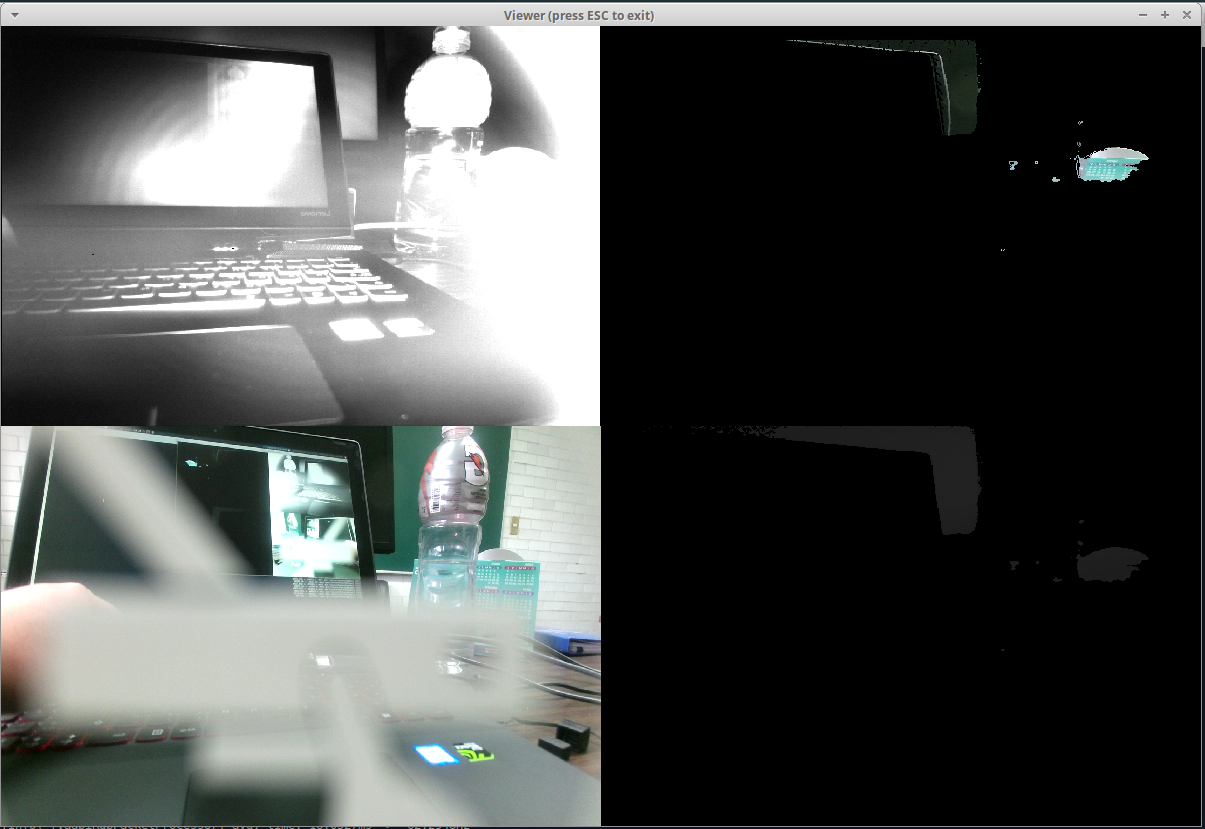
- Programar en el robot algoritmos con redes neuronales para realizar algunas de las acciones siguientes:
- Reconocimiento de objetos utilizando visión y/o tacto.
- Reconocimiento de palabras en español.
- Navegación.
- Redactar prácticas de laboratorio utilizando los resultados obtenidos.
Las condiciones son:
- Estar formalmente inscrito en una licenciatura
- No haber transcurrido más de 18 meses desde la conclusión de sus estudios.
- Tener un promedio global mínimo de 8.0.
- No contar con beca de alguna otra institución, pública o privada.
- No tener relación laboral con la UNAM.
- Mantener el promedio y la constancia regular en los estudios.
- No tener más de cuatro materias pendientes para concluir los créditos de la licenciatura (de preferencia ninguna), en caso de elegir titulación por tesis. Tener el 100% de los créditos y el idioma liberado en caso de elegir titulación por actividad de apoyo a la investigación.
- Tener el servicio social liberado.
- Concluir el trabajo con reporte escrito, a más tardar, en Septiembre del 2016.
Se ofrece el tabulador de la UNAM para proyectos PAPIME:
- $2,730.00 mensuales, durante 6 meses.
Interesados: presentarse en el cubículo 119 del Depto. de Matemáticas, con la Dra. Verónica E. Arriola. Traer historial académico completo impreso.
La opción de titulación será registrada oficialmente para poder asignar la beca, por lo que los tiempos para concluir el trabajo son estrictos. Consultar detalles sobre el registro en:
Titulación, Facultad de Ciencias.